Робототехникадағы жасанды интеллектті кірістірілген платформаларға енгізу: деректер жинау, VLA модульдерін нәзік баптау және құрылғыдағы оңтайландырулар

Жасанды интеллекттің робототехника саласына енуі жаңа кезеңге аяқ басты. Бұл технология роботтардың кешенді және бейімделгіш әрекет етуіне мүмкіндік беріп, көптеген тапсырмаларды тиімді орындауға септігін тигізеді. Әсіресе, бұл үрдістер кірістірілген (энедед) жүйелерде – яғни шағын, ресурсы шектеулі құрылғыларда – жүзеге асырылғанда, оның маңызы арта түседі. Мұндай платформалар көбінесе есептеу қуаты, жад көлемі және энергия тұтыну шектеулері бар ортада жұмыс істейді. Сондықтан жасанды интеллект модельдерін кіші көлемдегі құрылғыларға бейімдеу, оңтайландыру және оларды нақты өмірлік тапсырмаларға бағыттау ерекше сұранысқа ие.
Кіріспе
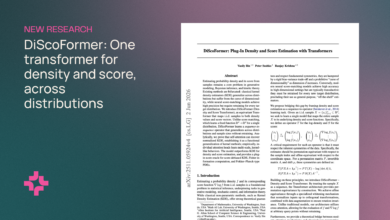
Робототехникада жасанды интеллекттің негізгі элементтерінің бірі – көзбен қабылдау мен тілдік сипаттамаларды үйлестіретін Vision–Language models (VLM), одан әрі роботтың нақты әрекетін басқаруды қамтамасыз ететін Vision–Language–Action (VLA) модельдері шықты. Бұл модельдер бірлесіп жұмыс істеп, роботтарға күрделі міндеттерді автономды орындауға мүмкіндік жасайды. Алайда, оларды кірістірілген платформаларда іске қосу күрделі мәселе болып отыр өйткені ол үшін нақты уақыттық жауап беру, ресурстарды үнемді пайдалану және орындау жылдамдығы маңызды факторлар болып табылады.
Негізгі түсіндірме
ВLA модельдерін шағын роботтық құрылғыларға енгізу жай ғана модельді сығымдау арқылы шешілмейді. Бұл кешенді инженерлік мәселе: архитектураны бірнеше бөліктерге бөлу, жауап беру уақытына бейімделген жоспарлау, аппараттық құралдарға сәйкес келетін есептеу тәсілдерін қолдануды талап етеді. Модельдің толық жұмысілік кешігуі (латенттігі) роботтың нақты әрекетін орындау уақытынан қысқа болуы керек, әйтпесе жүйе баяу жұмыс жасап, қателіктер пайда болады.
Деректер жинаудың маңызды аспектілері
Жұмыс сапасына тікелей әсер ететін бірден-бір фактор – көлеміне қарағанда сапасы жоғары, үйлесімді және әртүрлі деректер жиынтығын алу. Мысалы, «Шай пакетінің қапшығын шыныаяққа қою» сияқты тапсырма бойынша келесі негізгі қағидаттар берілді:
- Тұрақтылық: камераларды бекітіп, жарық көзін бақылауда ұстау, ақпарат жинау кезінде камералардың орны ауыспау керек.
- Құралға орнатылған камераны қолдану: манипуляциялық әрекеттерді нақты бақылау үшін құралға орнатылған камера жетік көру бұрышын қамтамасыз етеді.
- Қолтықтаудың жақсаруы: аппараттық кішкене түзетулер, мысалы, құлыптардың сырғымауын азайту, тапсырманың орындалуын тұрақтандырады.
- Әрқилылық пен бөлімдер: деректер әртүрлі позициялар мен қозғалыстарды қамтып, оқыту мен тексеру жиынтықтары дұрыс ажыратылады.
VLA модельдерін нәзік баптау
Оқытудың басты міндеті – модель әрекетінің дәлдігі, жалпылау қабілеті және қозғалыс ыңғайлылығын үйлестіру. Таңдау моделі ретінде ACT және SmolVLA көрсетілді. Оқыту үшін 120 эпизод жазылды, үш камера комбинациясында бейнеленді, оның ішінен бір кластер тексеру жиынтығы үшін бөлініп алынды. Оқыту барысында оптималды чекпойнттарды таңдау кезінде тек оқыту шығынына емес, сонымен бірге оқыту мен тексеру жиынтықтарындағы табысты көрсеткіштерді ескеру маңызды.
Контекст және мысалдар
Мысал ретінде NXP i.MX95 платформасына негізделген нақты жүйелік интеграция келтірілді. Ол бірнеше процессорлық ядро мен нейрондық есептегіштер, мультимедиялық процессорларға ие. Бұл платформада модель жұмысын оңтайландыру үш негізгі бағытта жүргізілді:
- Жүйені бөліктерге бөлу: VLA графын кодтағыш, декодтағыш және әрекет блоктарына бөлу арқылы әрқайсысын жеке баптап, өнімділігін арттыруға мүмкіндік берілді.
- Квантизация: есептеулердің дәлдігін сақтай отырып, жад пен есептеу ресурстарын үнемдеу үшін жадты ықшамдау әдістері қолданылды. Бірыңғай өңдеу блогындағы деректердің сапасы мен жылдамдығын салыстырып, оңтайлы үлгіні анықтау жүзеге асты.
- Асинхронды шешім қабылдау: роботтың қолының қозғалысы мен модельдің команда әзірлеуі бір уақытта жүретіндей ұйымдастырылды. Бұл роботтың белсенділігі мен жауап кедергісін төмендетеді.
Практикалық маңызы
Осы әдістер НXP i.MX95 платформасында бірнеше камералық жүйемен және нақты уақыттағы әрекетпен бақыланатын автономды роботтық қосымшаларда жоғары өнімді жұмысты қамтамасыз етеді. Жүйелік бөліну және квантизация әдістері ресурсы шектеулі құрылғыларда да күрделі есептеулерді орындауға мүмкіндік береді. Нәтижесінде роботтар өз ортасындағы объектілермен дұрыс әрекет жасау үдерісін жылдам және дәл орындайды. Бұл өнеркәсіп, қызмет көрсету және тұтынушылық салаларда құралдар мен жүйелердің сенімділігін арттырмақ.
Қорытынды
Робототехникадағы жасанды интеллектті кірістірілген жүйелерде пайдалану көпқырлы мәселе ретінде қарастырылады. Ол арнайы деректер жинау әдістерін, модельді нәзік баптауды және аппараттық мүмкіндіктерге сәйкес оңтайландыруларды талап етеді. NXP i.MX95 платформасындағы тәжірибе көрсеткендей, мұндай кешенді тәсіл заманауи VLA модельдерін шынайы уақыт режимінде және ресурсы шектеулі ортада тиімді қолдануға мүмкіндік береді. Бұл алдағы дамудың әрі қарайғы бағыттарын айқындайды және роботтық жүйелердің интеллектін жаңа деңгейге көтереді.
TAGS: жасанды интеллект, робототехника, кірістірілген жүйелер, деректер жинау, модельді баптау, ресурсты оңтайландыру, NXP i.MX95
Дереккөз: Hugging Face Blog